华为:我们的自动驾驶技术比特斯拉牛,自动驾驶的原理是啥?
的有关信息介绍如下:今天我们来聊一下汽车的自动驾驶原理是什么?
 其实自动驾驶的原理不是很复杂,我们用最简单的来说就是用一台车子,然后经过改装以后再加上几个传感器,然后在加装一套开源的自动驾驶计算平台,这就完事了。随着现在科学进步的发展,很多汽车都用上了自动驾驶技术,顾名思义也就是不需要人类驾驶汽车,汽车就可以自己行事那么很多人都好奇自动驾驶的原理是怎样的凯枣呢?
其实自动驾驶的原理不是很复杂,我们用最简单的来说就是用一台车子,然后经过改装以后再加上几个传感器,然后在加装一套开源的自动驾驶计算平台,这就完事了。随着现在科学进步的发展,很多汽车都用上了自动驾驶技术,顾名思义也就是不需要人类驾驶汽车,汽车就可以自己行事那么很多人都好奇自动驾驶的原理是怎样的凯枣呢?
 但是这三种传感器都有着自己的优势,就像我们现在大部分汽车都有的倒车雷达,倒车雷达就属于传统雷达这种成本也非常低,而且穿透性比较好,并且不会受到雨雾等天气环境的影响,但是传统雷达也有缺点,比如它的覆盖范围非常小,而且不能对周围环境的物体做出一个准确的判断。传感器也就是自动驾驶汽车的眼睛,他也就像人也一样,可以用来收集汽车周围环境的一些信息,比如现在市面上这些自动驾驶汽车,其实都是使用了三种传感器摄像头,lider激光雷达和传统雷达。
但是这三种传感器都有着自己的优势,就像我们现在大部分汽车都有的倒车雷达,倒车雷达就属于传统雷达这种成本也非常低,而且穿透性比较好,并且不会受到雨雾等天气环境的影响,但是传统雷达也有缺点,比如它的覆盖范围非常小,而且不能对周围环境的物体做出一个准确的判断。传感器也就是自动驾驶汽车的眼睛,他也就像人也一样,可以用来收集汽车周围环境的一些信息,比如现在市面上这些自动驾驶汽车,其实都是使用了三种传感器摄像头,lider激光雷达和传统雷达。
 所以摄像头就是市面上大部分自动驾驶汽车所必备的传感器,他和雷达不一样,摄像头没有穿透力,但是它需要光线进行拍摄,然后通过自动驾驶的数据对拍摄的照片进行识别,特斯拉就采用的是摄像头传感器的方式,而且相对于激羡扮光雷达摄像头的成本也很低。而激光雷达就可以通过激光射线来构建出汽车周围环境的3d影像图,可以做出物体的精准判断,但是激光雷达也有缺点,比兄孙灶如它会容易受到雨 were天气的影响,而且激光雷达的生产工艺比较困难,而且产量非常小,所以激光雷达的成本很高,一颗激光雷达的售价在50万人民币左右。
所以摄像头就是市面上大部分自动驾驶汽车所必备的传感器,他和雷达不一样,摄像头没有穿透力,但是它需要光线进行拍摄,然后通过自动驾驶的数据对拍摄的照片进行识别,特斯拉就采用的是摄像头传感器的方式,而且相对于激羡扮光雷达摄像头的成本也很低。而激光雷达就可以通过激光射线来构建出汽车周围环境的3d影像图,可以做出物体的精准判断,但是激光雷达也有缺点,比兄孙灶如它会容易受到雨 were天气的影响,而且激光雷达的生产工艺比较困难,而且产量非常小,所以激光雷达的成本很高,一颗激光雷达的售价在50万人民币左右。
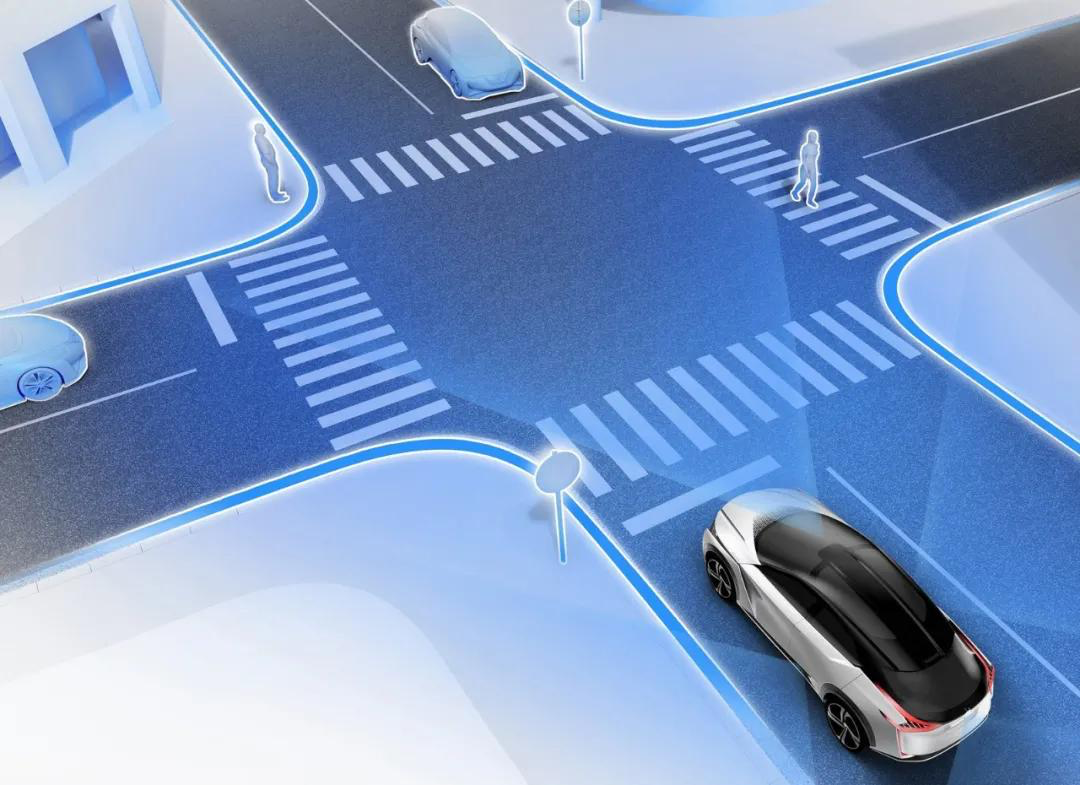
自动驾驶汽车通过搭载的传感器收集到周围环境的数据以后就会被传输到插在电脑中进行数据分析处理,然后最后做出反应。
在这个过程中,其实和真人驾驶完成的过程一样,就像我们人眼看到周围的环境以后,然后经过大脑处理最后作出决定反应。
自动驾驶要想覆盖更多的地方的话,就需要收集处理足够多的数据,而且不同的路况也会给电脑带来不同的处理结果,所以当真人驾驶和自动驾驶在路面上行驶时很多不确定性就变大了,自动驾驶汽车做出的决定难度也会加大。